|
The CCRS NOAA-14 Fire Detection Algorithm: Applications to All NOAA Satellites A program is currently underway at CCRS to generate historical fire maps from the 80s and 90s using the latest CCRS fire detection algorithm (NOAA-14 algorithm). While the CCRS algorithm was designed specifically to handle NOAA-14 data its ability to correctly identify fires using other sensors data is not known. For this reason, the current program attempts to use the CCRS algorithm and produce fire maps from different sensors NOAA-11 and NOAA-9. The generated fire maps will be compared with fire maps generated by each sensor’s algorithm to assess the accuracy of the CCRS generated fire maps. The assessment of these maps is based on two simple criteria
The work currently completed is the assessment of the NOAA-14 fire detection algorithm with respect to processing NOAA-11 sensor’s data. For this purpose NOAA-11 data from different years were processed using both the NOAA-11 and the NOAA-14 fire detection algorithms. The images on the right show the results for selected scenes in different parts of Canada. Study Findings
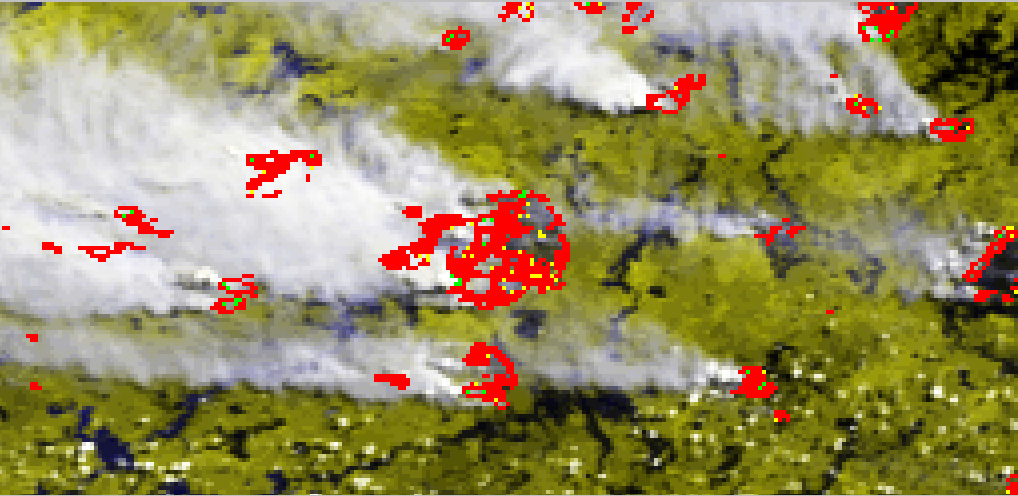
Applications of the CCRS Algorithm Over North America A research initiative is currently underway at CCRS to develop fire detection algorithms that can be applied across a variety of North American land cover types. The CCRS fire detection algorithm was originally developed to detect active forest fires over the Canadian boreal forest zone. It basically exploits both the spectral and thermal information from the AVHRR daily images for mapping active fires. While the results of its applications over the Canadian forests were successful, the focus of this research was to test and adapt the algorithm to properly identify fires over North America. The preliminary applications of the algorithm in the United States showed significant number of falsely detected fires, specifically in the western and southern US. The false fires occurred over a variety of non-forest warm land cover types such as open shrub land, sparsely vegetated surfaces, pasture and range lands and at the edges of thin clouds. It was thus necessary to adjust the algorithm’s thresholds to reflect the change in the land cover classes encountered in the US that are not dominant in Canada. Using a training database of active fire and false fire pixels, the algorithm’s thresholds for eliminating false fires were modified to account for the relatively warm land surfaces encountered in the western and southern US. Two fundamental changes were made to the CCRS algorithm. The first one dealt with eliminating false fires at the edges of thin clouds over warm background. The second involved a new treatment for reducing the false fires due to sun glint. The modified algorithm was used to generate daily active fire maps across North America, which corresponded well to the location of fires mapped by USDA Forest Service. The images on the right show the original fire detection results before and after the changes are made to the algorithm.
|
|